Новый тип искусственного мышечного волокна, управляемого электрическим током.
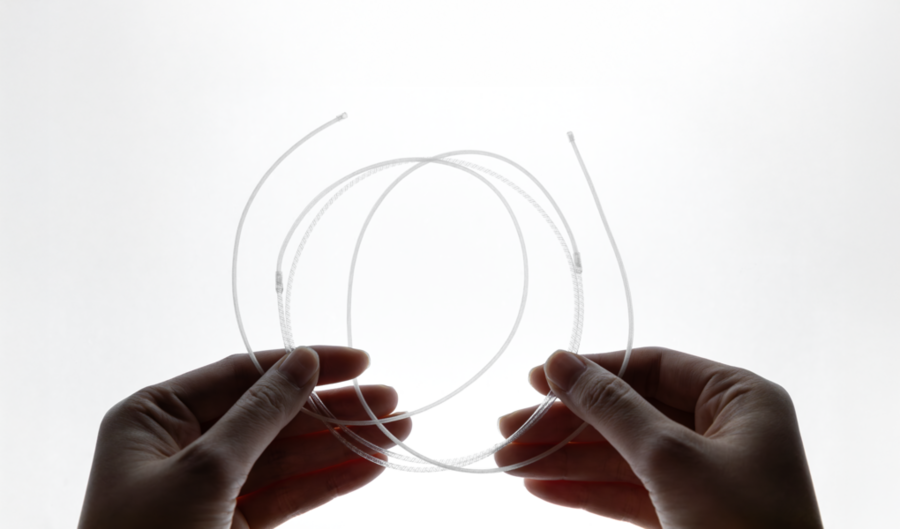
 Подпись : На фотографии изображена пара электрожидкостных волоконных мышц в руке. Эти легкие устройства миллиметрового размера приводятся в действие электрическим током, работают бесшумно и не требуют подключения к сети, обеспечивая работу, подобную работе мышц, без громоздкого внешнего оборудования, необходимого для традиционных жидкостных актуаторов. Автор фото : Озгун Килич Афсар Подпись : Волокнистые насосы — это гибкие трубки, которые создают собственное давление и поток под действием электрического поля. В сочетании с тонкими актуаторами Маккиббена они образуют самодостаточные тканые мышцы для мягких роботизированных систем. Авторы : Фотографии: Габриэле Пупилло, Озгун Килич Афсар Подпись : Волокнистые насосы можно наматывать на пучок актуаторов Маккиббена для создания компактных, высокоэффективных искусственных мышц. Авторы : Габриэле Пупилло, Озгун Килич Афсар Подпись : Количество исполнительных механизмов и насосов можно модульно регулировать для настройки производительности. В частности, соотношение исполнительных механизмов и насосов помогает определить скорость реакции системы. Автор фото : Озгун Килич Афсар Подпись : Исследователи продемонстрировали несколько конфигураций мышц для выполнения различных задач: быстрый рычаг, запускающий объекты за 0,2 секунды, сильный пучок, поднимающий 4 килограмма, и сплетенная пара бицепсов и трицепсов, которая сгибает роботизированную руку, оставаясь при этом достаточно гибкой для рукопожатия человека. Автор фото : Озгун Килич Афсар
Подпись : На фотографии изображена пара электрожидкостных волоконных мышц в руке. Эти легкие устройства миллиметрового размера приводятся в действие электрическим током, работают бесшумно и не требуют подключения к сети, обеспечивая работу, подобную работе мышц, без громоздкого внешнего оборудования, необходимого для традиционных жидкостных актуаторов. Автор фото : Озгун Килич Афсар Подпись : Волокнистые насосы — это гибкие трубки, которые создают собственное давление и поток под действием электрического поля. В сочетании с тонкими актуаторами Маккиббена они образуют самодостаточные тканые мышцы для мягких роботизированных систем. Авторы : Фотографии: Габриэле Пупилло, Озгун Килич Афсар Подпись : Волокнистые насосы можно наматывать на пучок актуаторов Маккиббена для создания компактных, высокоэффективных искусственных мышц. Авторы : Габриэле Пупилло, Озгун Килич Афсар Подпись : Количество исполнительных механизмов и насосов можно модульно регулировать для настройки производительности. В частности, соотношение исполнительных механизмов и насосов помогает определить скорость реакции системы. Автор фото : Озгун Килич Афсар Подпись : Исследователи продемонстрировали несколько конфигураций мышц для выполнения различных задач: быстрый рычаг, запускающий объекты за 0,2 секунды, сильный пучок, поднимающий 4 килограмма, и сплетенная пара бицепсов и трицепсов, которая сгибает роботизированную руку, оставаясь при этом достаточно гибкой для рукопожатия человека. Автор фото : Озгун Килич Афсар
Мышцы — это удивительно эффективная система для генерации контролируемой силы, и инженеры, разрабатывающие оборудование для роботов или протезов, долгое время пытались создать аналоги, которые могли бы приблизиться к их уникальному сочетанию силы, быстрой реакции, масштабируемости и управляемости. Но теперь исследователи из лаборатории MIT Media Lab и Политехнического университета Бари в Италии разработали искусственные мышечные волокна, которые приближаются ко многим из этих качеств.
Подобно волокнам, которые объединяются, образуя биологические мышцы, эти волокна могут быть расположены в различных конфигурациях в соответствии с требованиями конкретной задачи. В отличие от обычных роботизированных систем привода, они достаточно гибкие, чтобы комфортно взаимодействовать с человеческим телом и работать бесшумно без двигателей, внешних насосов или другого громоздкого вспомогательного оборудования.
Новые электрожидкостные волоконные мышцы — электрические приводы, выполненные в волоконном формате, — описаны в недавней статье, опубликованной в журнале Science Robotics. Руководителями работы являются аспирант Media Lab Озгун Килич Афсар, профессор Политехнического университета Бари Вито Какуччоло и четыре соавтора.
Воспроизвести видео. Электродвигатель в форме волокна.
Видео: MIT Media Lab
Новая система объединяет две технологии, поясняет Афсар. Одна из них — это искусственная мышца, приводимая в движение жидкостью, известная как тонкий актуатор Маккиббена, а другая — миниатюрный твердотельный насос, основанный на электрогидродинамике (ЭГД), который может создавать давление внутри герметичного жидкостного отсека без движущихся частей или внешнего источника жидкости.
До сих пор большинство гидравлических приводов, работающих на жидкостях, полагались на внешнюю «тяжелую, громоздкую и зачастую шумную гидравлическую инфраструктуру», — говорит Афсар, — «что затрудняет их интеграцию в системы, где важны мобильность или компактная, легкая конструкция». Это создало фундаментальное узкое место в практическом использовании гидравлических приводов в реальных условиях.
Ключом к преодолению этого узкого места стало использование интегрированных насосов, основанных на электрогидродинамических принципах. Эти насосы миллиметрового масштаба с электрическим приводом создают давление и поток, впрыскивая заряд в диэлектрическую жидкость и создавая ионы, которые увлекают за собой жидкость. Весящие всего несколько граммов и ненамного толще зубочистки, они могут изготавливаться непрерывно и легко масштабироваться. «Мы интегрировали эти волоконные насосы в замкнутый гидравлический контур с тонкими актуаторами Маккиббена», — говорит Афсар, отмечая, что это была непростая задача, учитывая различную динамику двух компонентов.
Ключевой стратегией проектирования было объединение этих волокон в так называемые антагонистические конфигурации. Какуччоло объясняет, что это происходит, когда «одна мышца сокращается, а другая удлиняется», как, например, когда вы сгибаете руку, и ваша бицепс сокращается, а трицепс растягивается. В их системе между двумя аналогичными по размеру актуаторами Маккиббена расположен волоконный насос миллиметрового масштаба, подающий жидкость в один актуатор для его сокращения и одновременно расслабляющий другой.
«Это очень напоминает конфигурацию и организацию биологических мышц», — говорит Афсар. «Мы выбрали эту конфигурацию не просто ради биомимикрии, а потому что нам нужен был способ хранения жидкости внутри мышечной структуры». Необходимость внешнего резервуара, открытого для атмосферы, была одним из главных факторов, ограничивающих практическое использование электрогидродинамических насосов в роботизированных системах вне лаборатории. Соединив два волокна Маккиббена в линию и расположив между ними волоконный насос для образования замкнутого контура, команда полностью устранила эту необходимость.
Ещё одним важным открытием стало то, что мышечные волокна необходимо предварительно наполнять под давлением, а не просто заполнять. «Существует минимальное внутреннее давление в системе, которое она может выдерживать, — говорит Афсар, — ниже которого насос может выйти из строя или временно перестать работать». Это происходит из-за кавитации, при которой образуются пузырьки пара, когда давление на входе насоса падает ниже давления пара жидкости, что в конечном итоге приводит к пробою диэлектрика.
Чтобы предотвратить кавитацию, они с самого начала применили «смещающее» давление, так что давление на входе в волоконный насос никогда не опускается ниже давления пара жидкости. Величина этого смещающего давления может регулироваться в зависимости от области применения. «Для достижения максимального сокращения, которое может генерировать мышца, мы обнаружили, что существует определенный диапазон смещающего давления, который является оптимальным», — говорит она. «Если вы хотите настроить систему для более быстрого отклика, вы можете увеличить это смещающее давление, хотя это и приведет к некоторому снижению максимального сокращения».
Какуччоло добавляет, что большинство современных роботизированных конечностей и кистей рук построены на основе электрических сервомоторов, конфигурация которых принципиально отличается от конфигурации естественных мышц. Сервомоторы создают вращательное движение на валу, которое должно быть преобразовано в линейное движение, тогда как мышечные волокна естественным образом сокращаются и растягиваются линейно, как и эти электрожидкостные волокна.
«Большинство роботизированных манипуляторов и человекоподобных роботов проектируются с учетом привода в движение сервомоторов, — говорит он. — Это создает ограничения в интеграции, поскольку сервомоторы сложно плотно разместить, и они, как правило, концентрируют массу вблизи приводимых ими суставов. В отличие от них, искусственные мышцы в виде волокон могут быть плотно упакованы внутри робота или экзоскелета и распределены по всей конструкции, а не сконцентрированы вблизи сустава».
Эти электрожидкостные мышцы могут быть особенно полезны для носимых устройств, таких как экзоскелеты, помогающие человеку поднимать более тяжелые грузы, или вспомогательные устройства, восстанавливающие или улучшающие ловкость. Но лежащие в их основе принципы могут применяться и в более широком смысле. «Наши выводы распространяются на роботизированные системы с жидкостным приводом в целом», — говорит Какуччоло. «Везде, где используются жидкостные приводы или где инженеры хотят заменить внешние насосы внутренними, эти принципы проектирования могут применяться в широком спектре роботизированных систем с жидкостным приводом».
Эта работа «представляет собой значительный шаг вперед в области мягких приводов на основе волокон», который «решает ряд давних проблем в этой области, особенно в отношении портативности и плотности мощности», — говорит Герберт Ши, профессор Лаборатории мягких преобразователей в Федеральной политехнической школе Лозанны в Швейцарии, который не принимал участия в этом исследовании. «Отсутствие движущихся частей в насосе делает эти мышцы бесшумными, что является большим преимуществом для протезов и вспомогательной одежды», — добавляет он.
Шей добавляет, что «эта высококачественная и тщательная работа преодолевает разрыв между фундаментальной гидродинамикой и практическими приложениями в робототехнике. Авторы предлагают комплексное решение на системном уровне — характеризуют отдельные компоненты, разрабатывают прогностическую физическую модель и проверяют ее с помощью ряда демонстрационных образцов».
Помимо Афсара и Какуччоло, в состав команды также входили Габриэле Пупилло и Дженнаро Витуччи из Политехнического университета Бари, а также Ведьян Бабатайн и профессор Хироши Ишии из Медиа-лаборатории Массачусетского технологического института. Работа была поддержана Европейским исследовательским советом и многопрофильным консорциумом Медиа-лаборатории.
Воспроизвести видео. Автономная работа электрожидкостных тканых мышц.
Видео: MIT Media Lab
Источник: news.mit.edu
Оцените материал:


