За пределами ловкости: почему контакт может определить следующую эру робототехники

Данная статья подготовлена при поддержке компании AGILINK.
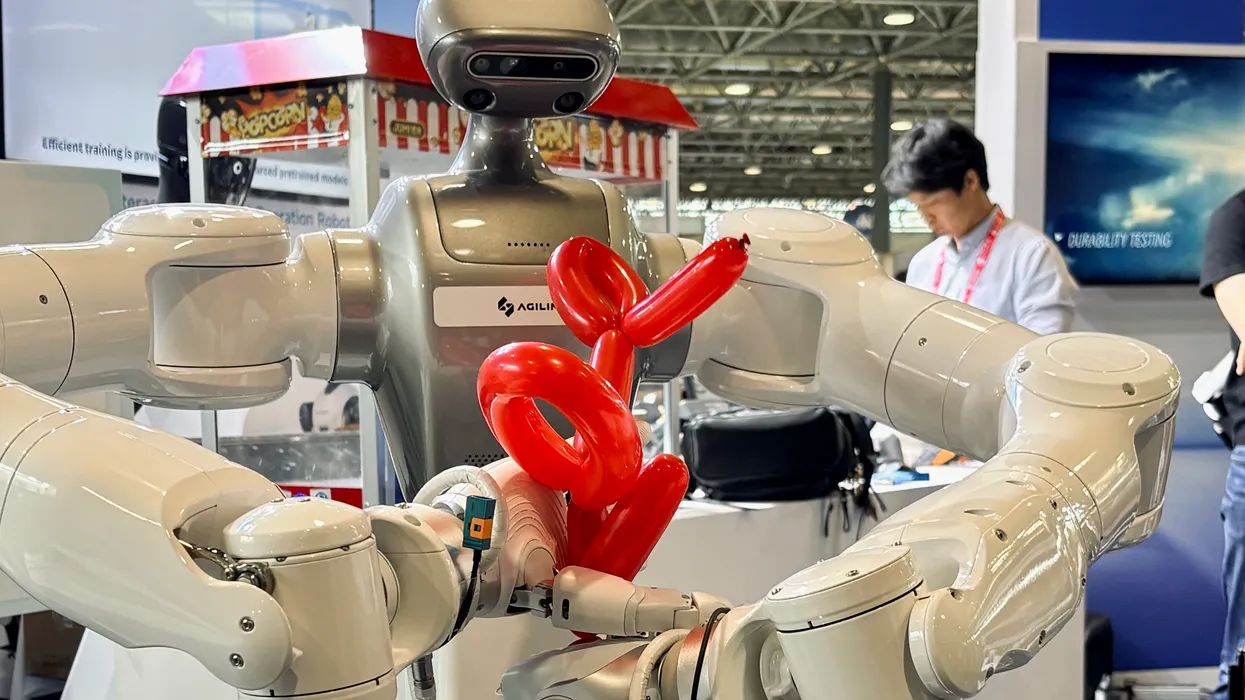
На всей территории выставочного зала Международной конференции IEEE по робототехнике (ICRA) 2026 года в Вене одна демонстрация, казалось, привлекла непропорционально большое внимание.
Две роботизированные руки создавали собачку из воздушного шара. Медленно и целенаправленно робот скручивал длинный шар в петли, изгибы и соединения, не лопая его. Посетители останавливались, наблюдали и часто возвращались с коллегами, чтобы посмотреть еще раз.
Демонстрация выступления собак с воздушными шарами от компании AGILINK привлекла внимание публики на выставке ICRA 2026.
На первый взгляд, демонстрация казалась почти шутливой. Однако среди робототехников скручивание воздушных шаров широко признано необычайно сложной задачей манипулирования объектами.
Воздушный шар легкий, сильно деформируемый, скользкий и чрезвычайно чувствительный к силе. Каждое скручивание изменяет его геометрию и внутреннее давление, превращая, казалось бы, простое действие в постоянно меняющуюся задачу физического взаимодействия.
Люди справляются с этими изменениями почти интуитивно. При изготовлении фигурки из воздушного шарика люди редко сознательно задумываются о регулировании силы, предотвращении скольжения или устойчивости при контакте. Они просто приспосабливаются.
Для роботов эти корректировки остаются чрезвычайно сложными. Задача состоит не просто в перемещении пальцев в нужное положение. Гораздо сложнее поддерживать стабильное взаимодействие, когда сам объект изменяется.
Основные моменты демонстраций AGILINK на ICRA 2026, включая визуально-тактильное восприятие, манипулирование предметами в руке, создание фигурок из воздушных шариков и другие задачи, требующие непосредственного контакта, которые стали возможны благодаря новейшей платформе OmniHand от компании.
Это различие помогает объяснить, почему собака из воздушных шаров привлекла столько внимания в Вене. То, что казалось демонстрацией ловкости, во многом было демонстрацией самого контакта.
По мере дальнейшего развития робототехники все больше исследователей приходят к схожему выводу: многие из самых сложных проблем в робототехнике начинаются только после контакта.
Использование интеллекта в области движений и контактов для роботизированного манипулирования
Скручивание воздушных шаров сочетает в себе две задачи, которые традиционно с трудом решались в робототехнике: выполнение задач в долгосрочной перспективе и манипуляции с большим количеством контактов.
Первый вопрос касается движения.
Фигурка собаки из воздушного шара не создается одним движением или поворотом. Она появляется в результате тщательно упорядоченной последовательности манипуляций, каждая из которых задает условия для последующих действий. Небольшая ошибка вращения, допущенная на раннем этапе, может показаться незначительной на первый взгляд, но спустя несколько шагов она может помешать формированию окончательной конструкции.
В этом смысле скручивание воздушных шаров — задача, рассчитанная на длительный срок. Успех зависит не только от правильного выполнения отдельных действий, но и от сохранения возможности продолжения всего процесса манипуляции в будущем.
Для решения этой задачи компания AGILINK начала с того, что собрала демонстрационные ролики от профессиональных художников по воздушным шарам. Действия человека были спроецированы на роботизированные руки, чтобы разработать первоначальную стратегию управления. Но одних лишь успешных демонстраций оказалось недостаточно.
На практике наиболее ценный опыт обучения приобретался, когда выполнение задачи начинало давать сбой. Всякий раз, когда возникала нестабильность, операторы вмешивались и корректировали действия в режиме реального времени. Эти вмешательства записывались и включались в циклы обучения с подкреплением, что позволяло системе учиться не только тому, как разворачиваются успешные демонстрации, но и тому, как опытные операторы восстанавливаются, когда что-то начинает идти не так.
В ходе этого процесса робот постепенно приобрел возможности, необходимые для выполнения задач в долгосрочной перспективе — набор способностей, которые AGILINK объединяет под термином «движущаяся интеллекция» : способность генерировать действия, координировать двуручное поведение и выполнять длительные последовательности манипуляций в условиях неопределенности реального мира.
Смартфон OmniHand 3 Ultra-M представлен на выставке ICRA 2026. AGILINK
Однако одно лишь движение не объясняет, почему скручивание воздушных шаров остается сложной задачей. Вторая сложность заключается в контакте.
Робот должен постоянно регулировать силу, корректировать места контакта и реагировать на незначительные изменения состояния объекта. Эти решения сложно закодировать с помощью явных правил. Даже опытные операторы-люди часто полагаются на тактильную интуицию, развитую с опытом, а не на сознательно сформулированные стратегии.
Анализ этих вмешательств показал, что многие сбои были вызваны не неправильной последовательностью действий, а самим нарушением контакта.
Для более точного воспроизведения динамики взаимодействия AGILINK собрала данные о контактно-ориентированных вмешательствах и включила эти взаимодействия в обучение с подкреплением. Вместо того чтобы учиться только тому, какие движения выполнять, система также научилась тому, как люди поддерживают стабильность, когда условия контакта начинают ухудшаться.
Компания AGILINK описывает эту возможность как контактный интеллект : способность устанавливать, поддерживать и адаптировать физическое взаимодействие по мере непрерывного изменения распределения силы, трения, деформации и геометрии контакта.
Различие между этими двумя возможностями тонкое, но важное. Интеллект управления движением определяет, что робот намеревается сделать. Интеллект управления контактом определяет, сможет ли он продолжать это делать. Для скручивания воздушных шаров необходимы оба подхода. Один обеспечивает последовательность действий, а другой поддерживает их физическую осуществимость.
Ютубер KhanFlicks повторяет движения OmniHand, учась складывать собачку из воздушного шарика на стенде AGILINK.
Между моментом, когда воздушный шар ускользает, и моментом, когда он лопается, существует узкая область стабильности. Успешная манипуляция зависит от того, насколько хорошо удастся найти эту область и оставаться в ней на протяжении всего выполнения задачи.
Представляем OmniHand 3 Ultra-M — удобную ручную кисть.
Демонстрация собаки из воздушных шаров показала возможности манипулирования объектом. Она также подняла более широкий вопрос: насколько развитым может быть контактный интеллект только за счет обучения? Робот может регулировать только то, что он воспринимает. Он может реагировать только с той скоростью, которую позволяет его оборудование.
По мере того как задачи манипулирования становятся все более сложными, исследователи обнаруживают, что прогресс зависит не только от более совершенной стратегии, но и от более точных сенсорных систем и более быстрой физической реакции.
Это осознание послужило основой для второго крупного объявления AGILINK на выставке ICRA 2026. Наряду с демонстрацией собаки на воздушном шаре, компания представила OmniHand 3 Ultra-M .
OmniHand 3 Ultra-M по размеру максимально приближен к руке взрослого человека. AGILINK
Эти два экспоната представляли разные этапы одной и той же технологической траектории. Если собака, управляемая воздушным шаром, продемонстрировала, на что способен контактный интеллект уже сегодня, то Ultra-M был разработан для изучения того, что может потребоваться для развития контактного интеллекта в будущем.
Разработка аппаратного обеспечения для анализа контактных данных
По размеру примерно соответствующая ладонь взрослого человека, модель OmniHand 3 Ultra-M объединяет 20 активных степеней свободы в форм-факторе, соответствующем человеческим меркам.
Наиболее отличительной особенностью является полностью прямая приводная архитектура. Благодаря использованию прямого привода во всей системе, конструкция руки обеспечивает более быструю и прозрачную регулировку силы, а также более широкий диапазон управления силой, что позволяет быстрее реагировать на изменение условий контакта. Для манипуляций с большим количеством контактов скорость реакции может быть столь же важна, как и самовосприятие.
Благодаря использованию прямого привода во всей системе, OmniHand 3 Ultra-M обеспечивает более быструю и прозрачную регулировку силы, а также более широкий диапазон регулировки силы, что позволяет быстрее реагировать на изменение условий контакта.
Платформа также включает в себя тактильное восприятие практически по всей поверхности ладони. На каждом кончике пальца расположен миниатюрный тактильный датчик, основанный на визуальном восприятии, а более 300 трехмерных точек тактильного восприятия распределены по всей ладони. Вместе они предоставляют информацию не только о том, где происходит контакт, но и о том, как этот контакт развивается.
Система предназначена для оценки распределения давления, сил сдвига, локальных деформаций, тенденций к скольжению и других динамических процессов взаимодействия, которые часто остаются невидимыми для традиционных систем управления на основе позиционирования.
Согласно тестам AGILINK, отдельные датчики обеспечивают разрешение по силе приблизительно 0,005 Н — что примерно эквивалентно определению веса листа бумаги, лежащего на кончике пальца. Пространственное разрешение достигает приблизительно 0,04 мм, а плотность считывания приближается к 50 000 точек на квадратный сантиметр.
OmniHand 3 Ultra-M распознает текстуру пера с помощью тактильного датчика, основанного на визуальном восприятии. AGILINK
Для ловких роботов контакт традиционно был в значительной степени скрытым процессом. Ultra-M разработан для того, чтобы сделать этот процесс более наблюдаемым.
Вместо того чтобы просто обнаруживать факт контакта, система пытается определить, где происходит взаимодействие, как распределяются силы, начинает ли возникать нестабильность и как стратегии манипулирования должны адаптироваться в ответ.
Собака, летающая по воздуху, дала представление о том, чего уже может достичь контактная аналитика. Ultra-M исследует другой вопрос: какие возможности могут потребоваться для дальнейшего развития контактной аналитики?
Физический мир остается самым строгим критерием оценки.
Значение контактного интеллекта выходит далеко за рамки создания фигурок из воздушных шаров. Многие задачи, которые по-прежнему сопротивляются автоматизации, связаны с нестабильным или деформируемым взаимодействием: вставка кабеля, работа с одеждой, гибкая упаковка, деликатная сборка, соединение разъемов, использование инструментов и бытовые манипуляции.
Эти задачи сложны не потому, что роботы не могут достичь нужного места, а потому, что поддержание стабильного взаимодействия после начала контакта остается чрезвычайно трудной задачей.
На протяжении десятилетий робототехника достигала многих своих успехов за счет снижения неопределенности. Заводы проектировались таким образом, чтобы движения роботов были предсказуемыми, повторяемыми и высокоструктурированными. Физический мир ведет себя иначе.
Всё большая часть исследований в области робототехники смещается в сторону самого взаимодействия — понимания того, как роботы могут устанавливать, поддерживать и адаптировать физический контакт в средах, которые остаются принципиально непредсказуемыми.
Объекты смещаются. Материалы деформируются. Трение меняется. Контакт развивается. Реальная среда редко следует заранее заданным сценариям. Если посмотреть на это под таким углом, то история с собакой из воздушных шаров на самом деле никогда не касалась только самой собаки из воздушных шаров. Внимание на ICRA привлекло не просто впечатляющая визуальная демонстрация, а то, что она показала: интеллект в физическом мире в конечном итоге измеряется взаимодействием.
По мере развития технологий генерации движений, все большая часть исследований в области робототехники смещается в сторону самого взаимодействия — понимания того, как роботы могут устанавливать, поддерживать и адаптировать физический контакт в средах, которые остаются принципиально непредсказуемыми.
Для роботов, переходящих из структурированных сред в менее предсказуемые условия реального мира, управление контактом может стать столь же важным, как и само движение.
Оцените материал:


