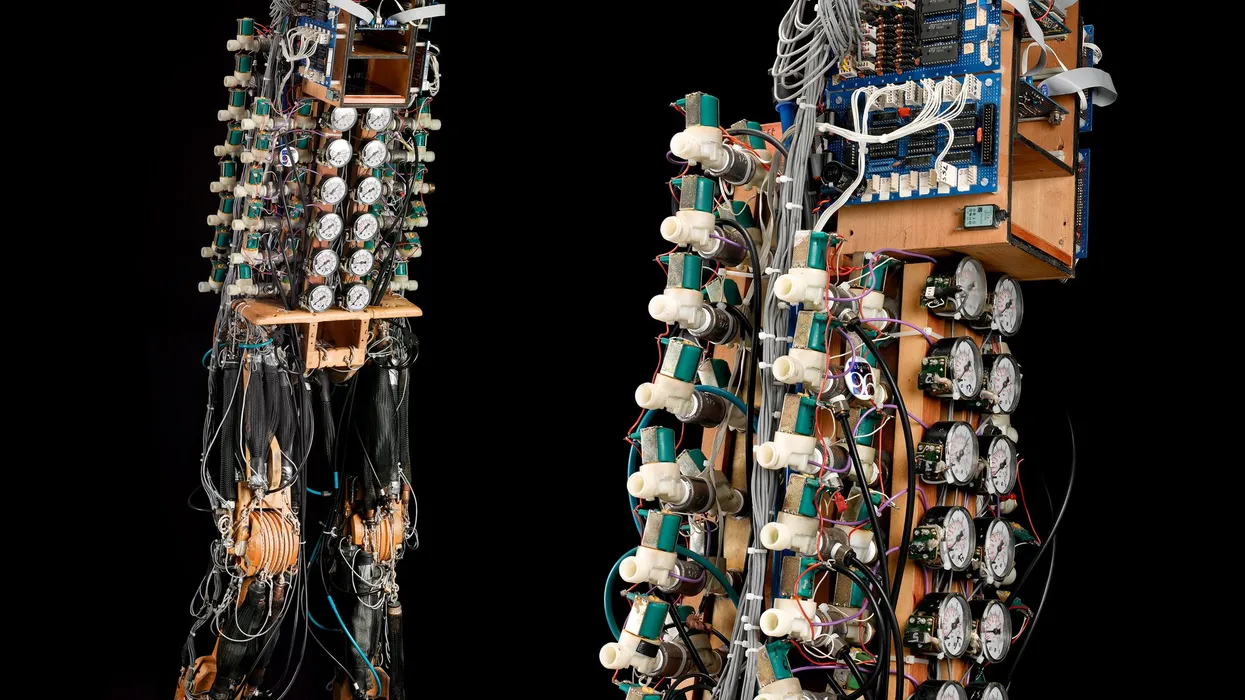
В этом самодельном двуногом роботе вместо двигателей используются пневматические «воздушные мышцы».

В 1987 году Ричард Гринхилл, британский фотограф, увлеченный робототехникой (но не имевший соответствующего образования), решил создать человекоподобного робота в натуральную величину, способного выполнять полезные задачи, например, переносить багаж. Он работал в стартапе под названием Intergalactic Robots, но не смог убедить никого построить такую машину, поэтому решил создать её сам на чердаке своего дома.
Чтобы продвинуть свой проект, он организовал еженедельные встречи примерно дюжины единомышленников. Каждую среду вечером его жена Салли варила большую кастрюлю спагетти, а группа возилась с компонентами, найденными в старых принтерах и на свалках. Они назвали себя «Теневой группой». В итоге они сконструировали несколько разных роботов, но их главным проектом стал двуногий «Теневой шагающий робот».
В 1987 году фотограф Ричард Гринхилл организовал еженедельные встречи энтузиастов-самодельщиков для работы над проектами на чердаке, включая «Теневого странника». Ричард Гринхилл и Дэвид Бакли
Друг Гринхилла, Дэвид Бакли, эксперт по робототехнике и аниматронике, с которым он познакомился на выставке Intergalactic, набросал приблизительный проект, основанный на медицинских учебниках по строению костей и движению мышц человека. Скелет робота, сделанный из клена, был значительно упрощен — всего одна кость в голени и один широкий палец на каждой стопе. Двухосевая конструкция голеностопного сустава обеспечивала две степени подвижности. Коленный сустав не имел сложных элементов, таких как надколенник.
Гринхилл не хотел, чтобы робот использовал моторы, поэтому его движение контролировалось с помощью сжатого воздуха, который растягивал и сокращал 28 «воздушных мышц» — его версию мышцы Маккиббена, изобретенной в 1950-х годах для имитации мускулатуры с помощью пневматики. Мышцы были соединены с костями через восемь суставов (тазобедренные, коленные, голеностопные, пальцы ног), что обеспечивало 12 степеней свободы.
В безголовом туловище робота располагались регулирующие клапаны, электроника и компьютерные интерфейсы. Его высота составляла 168 сантиметров, ширина — 46 см, а вес — около 38 килограммов. Группе удалось заставить робота надежно стоять и сохранять равновесие; он даже мог восстанавливать центр тяжести, если его немного подтолкнуть. Но ходьба оказалась более сложной задачей.
Рич Уокер присоединился к группе еще подростком и начал писать программное обеспечение, чтобы заставить робота стоять. Его особенно интересовало использование нейронных сетей для решения задач балансировки, хотя он столкнулся с рядом аппаратных проблем, включая ненадежность датчиков и клапанов, а также общую хрупкость робота. Со временем Уокер и команда разработали стандартную библиотеку подпрограмм для управления роботом. Уокер написал подробное описание Shadow Walker в 1999 году, которое доступно на веб-сайте Дэвида Бакли.
1-я Международная Олимпиада роботов
К тому времени, когда группа Shadow Group начала разработку Shadow Walker, инженеры в академических кругах и промышленности уже несколько десятилетий работали над робототехникой. Первый в мире промышленный робот, Unimate, дебютировал в 1961 году, а в 1967 году Дональд Мичи и другие начали создавать серию роботов Freddy для исследования машинного интеллекта. IEEE создала свою первую специализированную организацию по робототехнике в 1984 году, учредив Совет по робототехнике и автоматизации IEEE, который в 1987 году стал Обществом робототехники и автоматизации IEEE. Также в 1987 году была создана некоммерческая Международная федерация робототехники для содействия исследованиям, разработке, использованию и сотрудничеству в области робототехники.
Пока Shadow Walker расширял границы возможностей самодельных человекоподобных роботов, промышленные человекоподобные роботы также набирали популярность. В 1986 году Honda начала работу над экспериментальными (серия E), а затем и прототипными (серия P) человекоподобными роботами, наконец, представив P2 в 1996 году. Рост P2 составлял 183 см, а вес — 210 кг. Это был первый человекоподобный робот, способный к устойчивой, автономной ходьбе. Эта работа в конечном итоге привела к разработке новаторского робота ASIMO.
Друг Гринхилла, робототехник Дэвид Бакли, использовал медицинские учебники для создания человекоподобного дизайна Теневого Странника. Ричард Гринхилл и Дэвид Бакли
В конце 1980-х годов общественность была одновременно очарована и ужаснута потенциалом роботов. Предприятия видели в роботах способ повышения производительности, в то время как рабочие опасались, что роботы отнимут у них рабочие места. Дети воспринимали их как чудесные игрушки, а люди с ограниченными возможностями — как инструменты освобождения. Военные эксперты надеялись, что роботы будут вести войны, не подвергая опасности солдат, а политики размышляли о том, смогут ли роботы в конечном итоге получить право голоса. Философы считали, что роботы могут бросить вызов нашим представлениям об интеллекте (и глупости), в то время как религиозные люди боролись с опасениями по поводу будущего человечества, в котором будут доминировать роботы.
Упрощенная анатомия Теневого Странника включала всего одну кость в голени и один широкий палец на каждой стопе. (Science Museum Group)
Питер Моуфорт, соучредитель Института Тьюринга в Глазго, отметил эти разрозненные взгляды на роботов, когда объявил о проведении 1-й Международной Олимпиады роботов, которая должна была состояться 27 и 28 сентября 1990 года и быть организована Институтом Тьюринга и Университетом Стратклайда. Олимпийские игры должны были собрать лучших роботов мира и продемонстрировать их в поединке.
Сам Моуфорт считал все конкурирующие представления о роботах преувеличенными. Будучи опытным специалистом в области исследований машинного обучения и разработки робототехники, он не понаслышке знал об ограничениях современного уровня развития технологий: роботы редко работали так, как задумано, легко ломались и давали сбои даже при, казалось бы, тривиальных проблемах. Он представлял себе «Олимпиаду роботов» как испытательный полигон для оценки возможностей и ограничений последнего поколения роботов.
На Олимпийских играх роботов 1990 года в Глазго робот Shadow Walker был в штанах, чтобы скрыть свои пневматические «воздушные мышцы» от конкурентов. (Адам Харт-Дэвис/Science Source)
Приём заявок на участие был открытым. Вместо заранее определённых категорий соревнований организаторы решили рассмотреть заявки и сгруппировать участников на основе заявленных ими возможностей. Помимо определения победителей в отдельных дисциплинах, судьи выбирали абсолютного олимпийского чемпиона, основываясь на качестве оборудования, сложности поведения и новизне. Призы также вручались молодым участникам, технологиям, демонстрирующим коммерческий потенциал, и за дизайн. В итоге было заявлено более 50 роботов от университетов, промышленных предприятий и групп любителей из Канады, Франции, Индии, Японии, Мексики, Советского Союза, США, Великобритании и Югославии.
Было немало разочарований. Робот на колёсах, похожий на тележку для гольфа, повредил электропитание во время переноски олимпийского факела по улицам Глазго. Ворсистый ковёр на арене сбил с ног многих роботов, которые тренировались только на ровных, гладких полах. Дэвид Бакли позже пришёл к выводу, что соревнования были слишком сложными и что Олимпийские игры не способствовали развитию робототехники.
Конечно, были и победители. Неожиданным триумфом для винтажных технологий стала полностью механическая японская модель лучника XIX века из Музея автоматов в Йорке, Англия, которая завоевала золото в метании копья, обойдя конкурентов, которые были более чем на 100 лет моложе её. Общим олимпийским чемпионом стала модель Yamabico, созданная Сёдзи Судзуки в Университете Цукуба в Японии, которая завоевала бронзу в объезде препятствий и золото в следовании по стене, но была дисквалифицирована в категории «говорящая модель» за то, что не говорила по-английски.
Группа Shadow Group возлагала большие надежды на Shadow Walker. К сожалению, проект не оправдал ожиданий, и в гонке двуногих победил двуногий проект Кардиффского университета. Сейчас Shadow Walker находится в коллекции Лондонского научного музея.
Наследие Теневого Странника
В 1997 году клиент, желавший приобрести роботизированную ногу, заставил Shadow Group отнестись к делу серьезно и зарегистрироваться в качестве компании. Сейчас Shadow Robot — старейшая в Великобритании компания по производству робототехники. Рич Уокер, покинувший Shadow Group, чтобы получить степень бакалавра математики и диплом по информатике в Кембриджском университете, присоединился к Shadow Robot в 1999 году в качестве технического директора. Сегодня он является директором компании.
Компания Shadow Robot специализируется на прочных роботизированных руках, а не на шагающих роботах. Но ориентация на руки — это также наследие Shadow Group. Уокер вспоминает, что первая человекоподобная рука Shadow Group, созданная в конце 1990-х годов, впечатляла уже тем, что могла поднять пинту пива (гладкий, тонкостенный стакан). Сегодня руки Shadow Robot — это испытательные полигоны для проверки ловкости. Пневматические мышцы ушли в прошлое, их заменили актуаторы, которые точно перемещают каждый палец. Классическая модель содержит 20 двигателей, позволяющих осуществлять отведение и приведение с 24 степенями свободы.
Оператор робота Shadow Walker был одет в костюм, позволяющий записывать его движения и копировать их. Ричард Гринхилл
В недавнем посте в блоге Седжал Парсотомо, старший специалист по маркетингу в компании Shadow Robot, написала, что, хотя человекоподобные роботы отлично подходят для связей с общественностью, ключевым фактором успеха является специализированная ловкость: робот, который может войти на вашу фабрику, может впечатлять, но робот, который может надежно манипулировать объектами, способен кардинально изменить ситуацию.
В своих попытках сделать больше нескольких шагов робот Shadow Walker продемонстрировал присущие роботам трудности в освоении даже самых простых навыков. В августе 2025 года в Пекине прошли Всемирные игры человекоподобных роботов. Соревнуясь в таких видах спорта, как гимнастика, футбол и легкая атлетика, а также в более «полезных» задачах, таких как уборка отелей и сортировка лекарств, эти роботы могли бы буквально обогнать участников первых Олимпийских игр роботов 35 лет назад. И все же, для того чтобы роботы могли ориентироваться в созданной человеком среде, еще предстоит проделать огромную работу. Несмотря на поразительный прогресс, мы все еще очень далеки от создания действительно полезных человекоподобных роботов.
Часть продолжающейся серии статей, посвященных историческим артефактам, демонстрирующим безграничный потенциал технологий.
Сокращенная версия этой статьи опубликована в печатном номере за июнь 2026 года под заголовком «Учимся ходить».
Ссылки
Ричард Гринхилл в статье на корпоративном сайте Shadow Robot рассказывает о своей жизни и создании Shadow Group.
У Дэвида Бакли есть подборка материалов о роботе Shadow Biped Walker, включая технические характеристики версии 1999 года и брошюру с 1-й Международной олимпиады роботов.
В репортажах об Олимпиаде роботов можно найти что-то достойное светской хроники в газете La Repubblica, а в этом интервью Питера Моуфорта, взятом Лоррейн Келли для телеканала TV-am, представлены замечательные кадры соревнований.
Оцените материал:


