Новые исследования позволяют роботу прокладывать более точный курс.
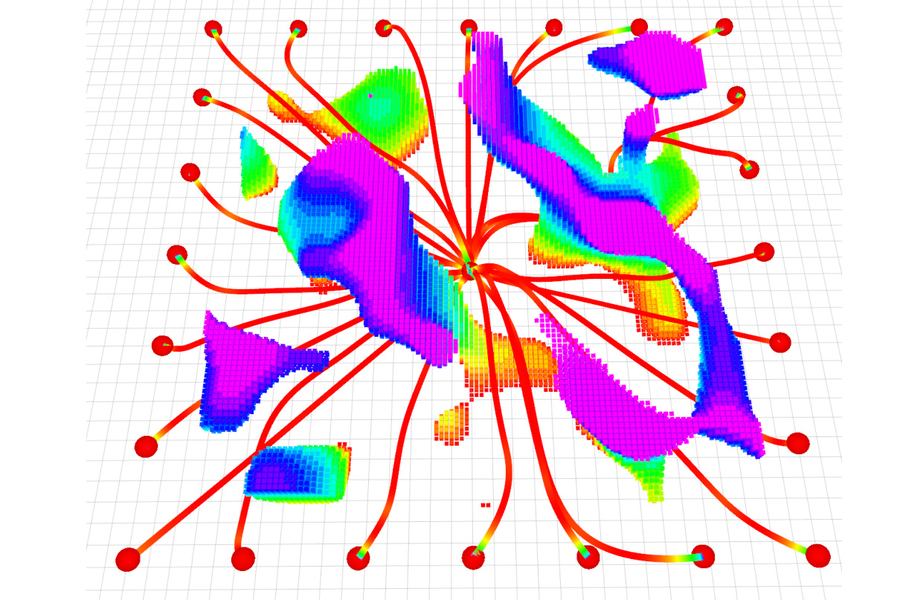
 Подпись : На рисунке показаны несколько траекторий полета БПЛА, который начинает движение из центра и направляется к 24 целям (точки по периметру). Траектории полета в основном красные и заканчиваются холодными цветами, что указывает на снижение скорости. Радужные облака представляют собой препятствия, причем более холодные цвета обозначают более высокие препятствия. Источник : Предоставлено исследователями.
Подпись : На рисунке показаны несколько траекторий полета БПЛА, который начинает движение из центра и направляется к 24 целям (точки по периметру). Траектории полета в основном красные и заканчиваются холодными цветами, что указывает на снижение скорости. Радужные облака представляют собой препятствия, причем более холодные цвета обозначают более высокие препятствия. Источник : Предоставлено исследователями.
После разрушительного землетрясения беспилотные летательные аппараты (БПЛА) могут пролетать сквозь обрушившееся здание, чтобы составить карту местности и предоставить спасателям информацию, необходимую для быстрого достижения выживших.
Однако это остается чрезвычайно сложной задачей для автономного робота, которому необходимо быстро корректировать свою траекторию, чтобы избегать внезапных препятствий, оставаясь при этом на заданном курсе.
Исследователи из Массачусетского технологического института и Пенсильванского университета разработали новую систему планирования траектории, которая решает обе задачи одновременно. Их метод позволяет БПЛА реагировать на препятствия за миллисекунды, оставаясь при этом на плавной траектории полета, что минимизирует время в пути.
Их система использует новую математическую формулировку, которая гарантирует безопасное движение робота к месту назначения по допустимому маршруту и требует меньших вычислительных затрат, чем другие методы. Таким образом, она генерирует более плавные траектории быстрее, чем современные методы.
Система планирования траектории также достаточно эффективна для полета в реальном времени, используя только бортовой компьютер и датчики робота.
Система с открытым исходным кодом, получившая название MIGHTY, не требует использования проприетарных программных пакетов, стоимость которых может составлять сотни тысяч долларов. Ее можно было бы легче внедрить в более широком спектре реальных условий.
Помимо поисково-спасательных работ, MIGHTY может использоваться в таких областях, как доставка «последней мили» в городских условиях, где БПЛА должны избегать зданий, проводов и людей, или для промышленной инспекции сложных конструкций, таких как ветряные турбины.
«MIGHTY достигает сопоставимых или даже лучших результатов, используя только инструменты с открытым исходным кодом, а это значит, что любой исследователь, студент или компания — в любой точке мира — могут использовать его бесплатно. Устраняя этот барьер стоимости, MIGHTY способствует демократизации высокопроизводительного планирования траекторий и открывает двери для гораздо более широкого сообщества, которое сможет развивать эту работу», — говорит Кота Кондо, аспирант в области аэронавтики и космонавтики и ведущий автор статьи об этом планировщике траекторий.
Вместе с Кондо в работе над статьей приняли участие Ювэй Ву, аспирант Пенсильванского университета; Виджай Кумар, профессор Пенсильванского университета; и старший автор Джонатан П. Хоу, профессор аэронавтики и космонавтики имени Форда и главный исследователь Лаборатории информационных и систем принятия решений (LIDS) и Лаборатории управления аэрокосмической техникой (ACL) Массачусетского технологического института. Исследование опубликовано в журнале IEEE Robotics and Automation Letters.
Преодоление компромиссов
Когда Кондо был ребёнком, после Великого восточнояпонского землетрясения произошла авария на АЭС Фукусима-Дайичи. Из-за отмены занятий в школе Кондо сидел дома и каждый день смотрел новости, наблюдая за тем, как рабочие осматривают и оснащают площадку реактора. Некоторым рабочим всё же приходилось проникать в опасные зоны, чтобы локализовать повреждения и оценить ситуацию, подвергая себя воздействию высоких доз радиоактивных материалов.
«Меня захватила идея создания автономных роботов, способных действовать в динамичных и опасных ситуациях, а затем возвращаться и сообщать о результатах людям, которые находятся вне зоны риска», — говорит Кондо.
Для решения этой задачи необходим мощный планировщик траектории, то есть программное обеспечение, которое определяет путь, по которому робот должен следовать, чтобы безопасно добраться из точки А в точку Б.
Однако многие существующие системы вынуждают к компромиссам, которые ограничивают производительность.
Хотя некоторые коммерческие системы могут быстро генерировать плавные траектории, их стоимость может составлять сотни тысяч долларов. Альтернативы с открытым исходным кодом часто уступают коммерческим решателям по производительности или сложны в использовании.
В рамках проекта MIGHTY Кондо и его коллеги разработали систему с открытым исходным кодом, которая генерирует высококачественные, плавные траектории, реагируя на препятствия в реальном времени и работая достаточно быстро для полета, используя только бортовые компоненты.
Для этого им пришлось преодолеть ключевую проблему, которая ограничивает возможности многих систем с открытым исходным кодом.
Эти методы обычно позволяют на первом этапе оценить, сколько времени потребуется роботу, чтобы добраться из точки А в точку Б. На основе этой фиксированной оценки времени в пути планировщик находит оптимальный маршрут для достижения пункта назначения.
Хотя использование фиксированного времени полета позволяет планировщику быстро построить траекторию, у этого подхода есть недостатки. Во-первых, если БПЛА приходится значительно отклоняться от заданного маршрута, чтобы избежать препятствий, ему, возможно, придется увеличить скорость, чтобы уложиться в отведенное время полета. Это затрудняет предотвращение внезапных опасностей.
Могучий метод
Вместо этого MIGHTY использует математический метод, называемый сплайном Эрмита, который оптимизирует время полета и траекторию одновременно, за один шаг, для формирования плавной траектории, которой можно точно управлять.
«Оптимизация пространственных и временных компонентов одновременно дает лучшие результаты, но теперь задача оптимизации становится настолько масштабной, что ее сложнее решить за приемлемое время», — говорит Кондо.
Исследователи применили остроумный метод для снижения этих вычислительных затрат.
Вместо того чтобы каждый раз создавать траекторию с нуля, MIGHTY сначала делает первоначальное предположение о траектории. Затем он уточняет траекторию с помощью итеративной оптимизации, используя карту местности, созданную лидарными датчиками БПЛА.
«Мы можем с достаточной точностью предположить, какой должна быть траектория, что намного быстрее, чем создавать все с нуля», — говорит Кондо.
Это позволяет MIGHTY реагировать в режиме реального времени на неизвестные препятствия, сохраняя при этом плавную траекторию и минимизируя время в пути. Система использует бортовые компоненты БПЛА, что важно для задач, где робот может перемещаться на значительном расстоянии от базовой станции.
В имитационных экспериментах MIGHTY потребовалось всего около 90 процентов вычислительного времени, необходимого для современных методов, при этом система безопасно достигла пункта назначения примерно на 15 процентов быстрее, чем эти подходы.
При тестировании системы на реальных роботах она достигла скорости 6,7 метров в секунду, избегая при этом всех препятствий на своем пути.
«В MIGHTY все интегрировано в единое целое. Для получения решения не требуется взаимодействие с каким-либо другим программным обеспечением. Это позволяет нам работать даже быстрее, чем некоторые коммерческие программы для решения задач», — говорит Кондо.
В будущем исследователи планируют усовершенствовать MIGHTY, чтобы его можно было использовать для управления несколькими роботами одновременно и проводить больше экспериментов в сложных условиях полета. Они надеются и дальше совершенствовать систему с открытым исходным кодом на основе отзывов пользователей.
«MIGHTY вносит важный вклад в гибкую навигацию роботов, переосмысливая само представление траектории. Сплайны Эрмита уже успешно применялись в визуальной одновременной локализации и картографировании, и приятно видеть, что их преимущества теперь используются для планирования траектории в мобильных роботах. Обеспечивая совместную оптимизацию геометрии пути, времени, скорости и ускорения при сохранении локального контроля траектории, MIGHTY дает роботам больше свободы для вычисления быстрых, динамически осуществимых движений в условиях загроможденной среды», — говорит Давиде Скарамуцца, профессор и директор группы робототехники и восприятия Цюрихского университета, который не принимал участия в этом исследовании.
Данное исследование было частично профинансировано Исследовательской лабораторией армии США и Агентством оборонной науки и техники Сингапура.
Источник: news.mit.edu
Оцените материал:
