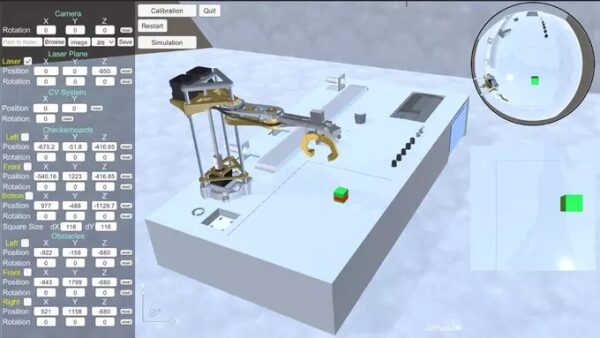

Цифровой двойник, реализованный на базе программы Unity. Цифровой двойник является виртуальной копией реального стенда, повторяя все реальное оборудование
© пресс-служба ЮУрГУ
Ученые Южно-Уральского государственного университета создали уникальную систему навигации для промышленных роботов, которая видит объекты даже сквозь блики и помехи. Исследователи разработали инновационный метод локализации объектов с помощью лишь одной панорамной камеры и лазерной линии. Метод позволяет роботам точно определять положение объектов в условиях сложных оптических помех. Результаты исследования, поддержанного грантом Российского научного фонда (РНФ), опубликованы в журнале Ain Shams Engineering Journal.
Представьте промышленного робота, которому нужно «увидеть» среди красных предметов один единственный объект, отмеченный лазером. При этом яркий свет создает блики на поверхностях, которые мешают работе. Ученые ЮУрГУ разработали метод, основанный на монокулярном всенаправленном зрении и структурированных световых полосах.
Традиционно для оценки расстояния роботам требуются либо две камеры (стереозрение), либо дорогостоящие лазерные дальномеры (лидары). Новая технология предлагает принципиально иной подход: всего одна панорамная камера с углом обзора 180°, линейный лазер (650 нм) и интеллектуальный алгоритм, который в реальном времени выделяет лазерную линию на объекте и преобразует её координаты в трехмерное положение цели.
«Система стала компактнее и надежнее, — поясняет доцент кафедры «Электропривод, мехатроника и электромеханика» факультета «Мехатроника и робототехника», участник проекта, поддержанного грантом РНФ, PhD Иван Холодилин — Меньше датчиков — меньше потенциальных проблем с калибровкой и синхронизацией. При этом одна панорамная камера позволяет роботу видеть практически все вокруг, включая пространство условно «за углом»».
Главное достижение разработки — способность алгоритма устойчиво работать в условиях, где традиционные методы терпят неудачу: темные и глянцевые поверхности, красные объекты (на которых лазерная линия может «сливаться» с фоном), зеркальные блики и даже частичное перекрытие лазерной полосы.
Алгоритм действует как «реставратор» лазерного следа: специальная многопороговая обработка в цветовом пространстве отсеивает помехи, морфологические операции «лечат» разрывы линии, а кластеризация и построение минимального остовного дерева восстанавливают непрерывность полосы даже при частичных перекрытиях.
Эффективность метода подтверждена экспериментально на реальной роботизированной установке с манипулятором SCARA.
Результаты оказались таковы:
• Средняя ошибка измерения координат в условиях помех составила всего 5.57 мм (против 18.08 мм у базовых методов)
• Ошибка реконструкции глубины уменьшилась на 69%
• В реальных экспериментах по захвату объектов средняя ошибка не превысила 6.435 мм
При этом время работы модуля лазерной локализации составляет около 0.5 секунды, что вполне приемлемо для промышленных применений.
Разработка выполнена при поддержке гранта Российского научного фонда и национального проекта «Наука и университеты» и ориентирована на практические задачи.
Так предложенная учеными ЮУрГУ технология идеально подходит для:
• роботизированной сортировки и перекладки деталей;
• контроля положения объектов на конвейере;
• работы в ячейках с агрессивной оптической средой (блики, переотражения).
Новая технология носит импортозамещающий характер, так как, в отличие от промышленных лидаров, стоимость нового решения значительно ниже. Панорамная камера и линейный лазер в сумме обходятся примерно в 10 тысяч рублей против сотен тысяч за качественный зарубежный лидар.
Главный «спорный» момент технологии сейчас — распознавание объектов нейросетью, занимающее около 2.93 секунды (86.2% общего времени). Планируется оптимизация этого этапа с использованием более мощных графических ускорителей и компактных нейросетевых архитектур, что позволит приблизиться к работе в реальном времени.
Разработка научного коллектива под руководством д.т.н., профессора Максима Григорьева и доцента кафедры «Электропривод, мехатроника и электромеханика», PhD Ивана Холодилина органично вписывается в мировой тренд отказа от дорогостоящих датчиков в пользу «умного зрения» и активных методов подсветки, открывая путь к созданию более доступных и компактных робототехнических систем для промышленности.
Источник: indicator.ru