Новая конструкция может быть адаптирована для сортировки складских товаров, разгрузки тяжелых грузов или помощи при подъеме пациентов с постели.

В садоводстве некоторые лианы особенно цепкие. По мере роста их одревесневшие усики могут с такой силой обвиваться вокруг препятствий, что валят заборы и деревья.
Вдохновленные извилистыми побегами вьющихся растений, инженеры из Массачусетского технологического института и Стэнфордского университета разработали роботизированный захват, способный обвиваться вокруг и поднимать различные предметы и даже людей, предлагая более щадящий подход, чем традиционные конструкции захватов.
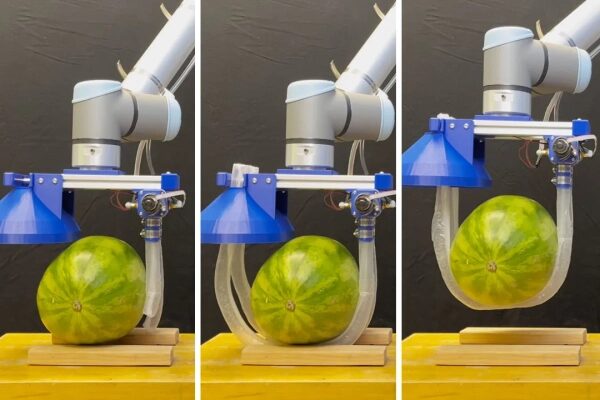
Новый робот состоит из герметичного ящика, из которого вытягиваются и растут длинные, похожие на лозы трубки. По мере вытягивания, эти трубки обвиваются вокруг объекта, а затем возвращаются обратно к ящику, где их концы автоматически фиксируются на месте, и они механически сматываются, мягко поднимая объект, словно в праще.
Исследователи предполагают применение этой технологии в самых разных областях, от сбора урожая в сельском хозяйстве до погрузки и разгрузки тяжелых грузов. В ближайшем будущем они изучают возможности ее использования в уходе за пожилыми людьми, например, для безопасного подъема человека с кровати. Часто в домах престарелых и реабилитационных центрах этот процесс перемещения осуществляется с помощью подъемника для пациентов, который требует от сиделки перемещения человека на простыню, похожую на гамак, которую можно прикрепить к устройству и поднять. С роботизированной системой этот ручной этап не требуется.
«Перемещение человека из постели — одна из самых физически сложных задач, которые выполняет сиделка», — говорит Кентаро Бархайдт, аспирант кафедры машиностроения Массачусетского технологического института и один из ведущих авторов статьи, посвященной этой работе. «Такой робот может помочь облегчить работу сиделки и быть более щадящим и комфортным для пациента».
Ключ к системе, разработанной лабораторией профессора Гарри Асады в Массачусетском технологическом институте и лабораторией профессора Эллисон Окамуры в Стэнфорде, заключается в сочетании действий «разомкнутого контура» и «замкнутого контура». В конфигурации с разомкнутым контуром роботизированная лоза может расти и обвиваться вокруг объекта, даже проникая под человека, лежащего на кровати. Затем она может продолжать расти обратно к своему основанию и прикрепиться к лебедке, создавая замкнутый контур, который можно втянуть для подъема объекта.
«Люди могут предположить, что для того, чтобы что-то схватить, нужно просто протянуть руку и схватить это», — говорит Бархайдт. «Но есть разные этапы, такие как позиционирование и удержание. Переходя от разомкнутого к замкнутому контуру, мы можем достичь новых уровней производительности, используя преимущества обеих форм на соответствующих этапах».
Хотя первоначальная идея команды была продиктована трудностями в уходе за пожилыми людьми, её можно адаптировать и для других задач, требующих захвата предметов. Уменьшенная версия была прикреплена к коммерческому роботизированному манипулятору для подъема различных тяжелых и хрупких предметов, включая арбуз, стеклянную вазу и гирю. Эти «плети» также могут извиваться по загроможденному контейнеру, чтобы вытащить нужный предмет.
«Мы считаем, что подобная конструкция робота может быть адаптирована для множества применений, — говорит Бархайдт. — Мы также рассматриваем возможность применения этого в тяжелой промышленности, например, для автоматизации работы кранов в портах и на складах».
Источник: www.technologyreview.com