
Обычно в учебных курсах по нерелятивистской квантовой механике формализм для описания спинового углового момента сразу дается в готовом виде без каких-либо удовлетворительных объяснений. Подходить к лекторам с вопросами об этом, как правило, тоже бесполезно — вразумительного ответа не получить, так как большинство физиков не знают ответа на этот вопрос. Вам будут говорить что угодно, но не точный ответ на вопрос.
В учебниках аналогично — в лучшем случае вам сначала расскажут что-нибудь про свойства спиноров и про матрицы Паули, а потом будет разрыв в переходе к конечным формулам.
Я решил написать статью, которая закроет этот разрыв. Вдохновила меня на это другая статья на Хабре «О спинорах человеческим языком», в которой, к сожалению, этот переход к физике хотя и был начат, но тоже так и не был осуществлен. От этой статьи переход можно сделать быстро (поэтому рекомендуется начать с нее). Начнем отсюда из этой статьи:

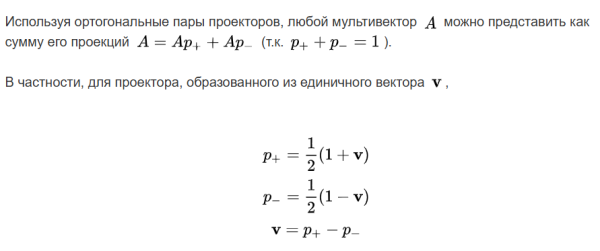
Описанное на этом скриншоте разложение можно осуществить с помощью любого единичного вектора. Но все эти векторы и даже скаляры — это комплексные матрицы 2 на 2, так как геометрическая алгебра Cl(3) описывается в базисе матриц Паули. Работать с комплексными матрицами 2 на 2 для описания спиновых направлений неудобно — они избыточны. Проще было бы, если придумать такое представление для векторов спина, чтобы его описывать вектором 2 на 1.
Обратим внимание на сами матрицы Паули:

Если в качестве единичного вектора взять вектор вдоль оси Oz, то проектор будет иметь максимально простой вид:

Итак, определим пространство спиноров  как идеал
как идеал  , где
, где  — проектор:
— проектор:

Тогда любой спинор  из этого идеала, представленный в виде матрицы, получается умножением произвольного элемента алгебры
из этого идеала, представленный в виде матрицы, получается умножением произвольного элемента алгебры  на матрицу-проектор
на матрицу-проектор  :
:

Независимо от того, какую матрицу  мы брали, у результирующей матрицы
мы брали, у результирующей матрицы  второй столбец всегда равен нулю. Это означает, что вся информация о нашем спиноре
второй столбец всегда равен нулю. Это означает, что вся информация о нашем спиноре  содержится исключительно в его первом столбце.
содержится исключительно в его первом столбце.
Тогда удобно писать спинор не матрицей, а одним столбцом.
Тогда базисные спиноры в их матричном представлении выглядят так:
Первый базисный спинор (матрица):

Второй базисный спинор (матрица):

Второй базисный спинор в абстрактной алгебре получается действием элемента  на проектор
на проектор  :
:

Таким образом,

Эти две матрицы, таким образом, можно описывать как столбцы 2 на 1, так как второй их столбец всегда равен нулю. Теперь покажем, как любой спин может быть описан через них — выразим собственные векторы соответствующих матриц Паули.
Ось Z (ось квантования по умолчанию)
Это базис, на котором всё строится. Состояния «вверх» и «вниз» являются собственными состояниями оператора  (матрицы
(матрицы  ).
).
1. Спин Вверх (вдоль оси Z) |↑_z⟩
Стандартная КМ:
![[1, 0]](data:image/svg+xml;base64,PHN2ZyB4bWxucz0iaHR0cDovL3d3dy53My5vcmcvMjAwMC9zdmciIHdpZHRoPSIzMiIgaGVpZ2h0PSIxNiIgdmlld0JveD0iMCAwIDMyIDE2Ij48cmVjdCB3aWR0aD0iMTAwJSIgaGVpZ2h0PSIxMDAlIiBzdHlsZT0iZmlsbDojY2ZkNGRiO2ZpbGwtb3BhY2l0eTogMC4xOyIvPjwvc3ZnPg== "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 22")
Геометрическая Алгебра:

Это наш «первый» базисный спинор, сам проектор.Если измерить спин вдоль оси
 , мы с вероятностью 100% получим значение
, мы с вероятностью 100% получим значение  .
.
![[1, 0]](/wp-content/uploads/2025/09/bf7191ae9a66b364b2472e1ede862ba1.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 22")

 , мы с вероятностью 100% получим значение
, мы с вероятностью 100% получим значение  .
.2. Спин Вниз (вдоль оси Z) |↓_z⟩
Стандартная КМ:
Геометрическая Алгебра:

Это наш «второй» базисный спинор, полученный действием e₁ на проектор.Если измерить спин вдоль оси
, мы с вероятностью 100% получим значение .
![[0, 1]](/wp-content/uploads/2025/09/7e9c15d6879330aa45d8faba7eaf14e4.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 26")

 , мы с вероятностью 100% получим значение
, мы с вероятностью 100% получим значение  .
.Ось X
Состояния «вправо» и «влево» являются собственными состояниями оператора  (матрицы σ₁). Они представляют собой равные суперпозиции состояний «вверх» и «вниз».
(матрицы σ₁). Они представляют собой равные суперпозиции состояний «вверх» и «вниз».
3. Спин Вправо (вдоль оси X) |→⟩ или |↑_x⟩
Стандартная КМ:
![(1/√2) * [1, 1]](data:image/svg+xml;base64,PHN2ZyB4bWxucz0iaHR0cDovL3d3dy53My5vcmcvMjAwMC9zdmciIHdpZHRoPSIxMDQiIGhlaWdodD0iMTYiIHZpZXdCb3g9IjAgMCAxMDQgMTYiPjxyZWN0IHdpZHRoPSIxMDAlIiBoZWlnaHQ9IjEwMCUiIHN0eWxlPSJmaWxsOiNjZmQ0ZGI7ZmlsbC1vcGFjaXR5OiAwLjE7Ii8+PC9zdmc+ "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 31")
Это
Геометрическая Алгебра:

Если измерить спин вдоль оси
, мы с вероятностью 100% получим . Если же измерить его вдоль оси , то с вероятностью 50% получим «вверх» и с вероятностью 50% «вниз».
![(1/√2) * [1, 1]](/wp-content/uploads/2025/09/b4d0a49b00f0d9d48d47841ae153d1b4.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 31")


 , мы с вероятностью 100% получим
, мы с вероятностью 100% получим  . Если же измерить его вдоль оси
. Если же измерить его вдоль оси  , то с вероятностью 50% получим «вверх» и с вероятностью 50% «вниз».
, то с вероятностью 50% получим «вверх» и с вероятностью 50% «вниз».4. Спин Влево (вдоль оси X) |←⟩ или |↓_x⟩
Стандартная КМ:
(1/√2) * [1, -1]
ЭтоГеометрическая Алгебра:

Если измерить спин вдоль оси
, мы с вероятностью 100% получим .


 , мы с вероятностью 100% получим
, мы с вероятностью 100% получим  .
.Ось Y
Состояния «вправо» и «влево» вдоль оси  являются собственными состояниями оператора
являются собственными состояниями оператора  (матрицы
(матрицы  ). Они также являются суперпозициями состояний «вверх» и «вниз», но с комплексной фазой, что критически важно.
). Они также являются суперпозициями состояний «вверх» и «вниз», но с комплексной фазой, что критически важно.
5. Спин Вправо (вдоль оси Y) |↗⟩ или |↑_y⟩
Стандартная КМ:
ЭтоГеометрическая Алгебра:

Здесь i — это обычная комплексная единица.Если измерить спин вдоль оси
, мы с вероятностью 100% получим .
![(1/√2) * [1, i]](/wp-content/uploads/2025/09/13ac88d5b47958900846ef2940674d77.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 44")


 , мы с вероятностью 100% получим
, мы с вероятностью 100% получим  .
.6. Спин Влево (вдоль оси Y) |↙⟩ или |↓_y⟩
Стандартная КМ:
(1/√2) * [1, -i]
ЭтоГеометрическая Алгебра:

Если измерить спин вдоль оси
 мы с вероятностью 100% получим
мы с вероятностью 100% получим


 мы с вероятностью 100% получим
мы с вероятностью 100% получим

Примеры решения задач.
Задачи на движение частицы со спином в магнитном поле решаются на основе уравнения Паули.

Здесь  — это сумма
— это сумма  , состоящая из произведений сигма-матриц Паули на проекции (числа) вектора магнитного поля на координатные оси.
, состоящая из произведений сигма-матриц Паули на проекции (числа) вектора магнитного поля на координатные оси.
 — это спинор, описываемый с помощью вектора-столбца.
— это спинор, описываемый с помощью вектора-столбца.
Задача 1.
Частица со спином 1/2, начальное состояние которой «спин направлен вправо» (вдоль оси X), помещается в постоянное однородное магнитное поле, направленное вдоль оси Z. Описать движение (прецессию) вектора спинового момента во времени.
Решение.
Стандартное уравнение Шредингера выглядит так:

Давайте переведем его на язык ГА.
|ψ⟩ становится нашим спинором ψ.
H становится нашим мультивектором H.
Умножение H|ψ⟩ становится геометрическим произведением Hψ.
Комплексная единица
 в алгебре
в алгебре  естественным образом представляется псевдоскаляром
естественным образом представляется псевдоскаляром  . Он обладает нужным свойством
. Он обладает нужным свойством 
 в алгебре
в алгебре  естественным образом представляется псевдоскаляром
естественным образом представляется псевдоскаляром  . Он обладает нужным свойством
. Он обладает нужным свойством 
Магнитное поле:

Начальное состояние ψ(0): «Спин вправо». Это собственное состояние оператора
 с собственным значением
с собственным значением  . В стандартной КМ это вектор
. В стандартной КМ это вектор
Наша цель: Найти ψ(t) и вычислить ожидаемые значения
 в зависимости от времени.
в зависимости от времени.

 с собственным значением
с собственным значением  . В стандартной КМ это вектор
. В стандартной КМ это вектор
 в зависимости от времени.
в зависимости от времени.Мы знаем, что в нашем формализме:
|↑⟩ (спин вверх) соответствует
 , где
, где 
|↓⟩ (спин вниз) соответствует

 , где
, где 

Следовательно, наше начальное состояние:

Подставляем все в уравнение Шрёдингера:
Поскольку I⁻¹ = -I, получаем:
Теперь подставим наш гамильтониан  :
:![dψ/dt = (I/ħ) [-γ(ħ/2)B₀e₃] ψ](/wp-content/uploads/2025/09/701e705c6c2a143744995aae7c4e8163.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 75")
![dψ/dt = [-γB₀/2 Ie₃] ψ](/wp-content/uploads/2025/09/79d38c4c96896f3a8bf784f5a7852592.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 76")
Давайте вычислим :
:
Произведение псевдоскаляра на вектор  дает бивектор
дает бивектор  , который представляет плоскость
, который представляет плоскость  , ортогональную вектору
, ортогональную вектору  .
.
Наше уравнение движения принимает окончательный, невероятно изящный вид:![dψ/dt = [-(γB₀/2) e₁e₂] * ψ](/wp-content/uploads/2025/09/d145e5c5f9b44cf26db76e58c1ad75ea.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 83")
Мы получили дифференциальное уравнение
 , где
, где  — это бивектор, умноженный на некоторую частоту.
— это бивектор, умноженный на некоторую частоту.
Решением такого уравнения является экспонента:
Подставим Ω:![ψ(t) = exp[-(γB₀/2)e₁e₂ t] ψ(0)](/wp-content/uploads/2025/09/9a617a2af8598bbaf5e8dd614f5d2449.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 87")
Теперь вспомним определение Ротора — оператора вращения в ГА: ,
,
где  — бивектор плоскости вращения, а
— бивектор плоскости вращения, а  — угол.
— угол.
Сравнивая это с нашим решением, мы видим, что  получается из
получается из  действием ротора:
действием ротора:![R(t) = exp[-(e₁e₂) * (γB₀t/2)]](/wp-content/uploads/2025/09/788e4ea0736ff065440a64cede672fa4.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 93")
Это ротор, который описывает вращение:
В плоскости:
(плоскость XY).На угол:

 (плоскость XY).
(плоскость XY).
Скорость этого вращения (угловая частота) равна

Это и есть знаменитая частота Ларморовской прецессии ω_L.
В формализме Геометрической Алгебры описание прецессии спина становится геометрически прозрачным:
Уравнение Шрёдингера
говорит, что изменение спинорного состояния  во времени определяется действием оператора
во времени определяется действием оператора 
Этот оператор
оказывается бивектором, который представляет плоскость вращения, перпендикулярную магнитному полю.Решение уравнения — это
 где — это Ротор.
где — это Ротор.Это уравнение дословно читается так: «Спинорное состояние в момент времени t получается путем поворота начального состояния
«.
 говорит, что изменение спинорного состояния
говорит, что изменение спинорного состояния  во времени определяется действием оператора
во времени определяется действием оператора 
 оказывается бивектором, который представляет плоскость вращения, перпендикулярную магнитному полю.
оказывается бивектором, который представляет плоскость вращения, перпендикулярную магнитному полю. где
где — это Ротор.
— это Ротор. «.
«.Таким образом, прецессия — это не какой-то сложный побочный эффект матричной алгебры, а прямое следствие того, что гамильтониан взаимодействия спина с магнитным полем в своей основе является генератором вращений (бивектором). Формализм ГА делает эту фундаментальную геометрическую природу явления очевидной. Итак:
![R(t) = exp[ -e₁e₂ (ω_Lt / 2) ]](/wp-content/uploads/2025/09/49c222921aab4ca2285b9d48dcf2030b.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 104")
Используя аналог формулы Эйлера для роторов, получаем:
Теперь применяем ротор к начальному состоянию:
![ψ(t) = [ cos(φ) - e₁e₂ sin(φ) ] [ (1/√2)(1 + e₁)p ]](/wp-content/uploads/2025/09/1c33ba0f51dc811a18dc9da7beae7c08.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 107")
где для краткости 
![ψ(t) = (1/√2) [ cos(φ)(1+e₁)p - sin(φ)e₁e₂(1+e₁)p ]](/wp-content/uploads/2025/09/84d2a39e11dfaafdbb205df20e6d9454.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 109")
Раскроем скобки во второй части, помня правила  и
и  :
:
Подставляем обратно:![ψ(t) = (1/√2) [ cos(φ)(p + e₁p) - sin(φ)(e₁e₂p - e₂p) ]](/wp-content/uploads/2025/09/1b7f11164117a4d21bb192c0a7dd0726.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 113")
Это точный вид спинора в любой момент времени t. Хотя он выглядит громоздко, он содержит полную информацию о системе.
Чтобы понять, что происходит физически, нам нужно перейти к матричному представлению и вычислить ожидаемые значения 
Начальное состояние в виде вектора-столбца:
![ψ(0) ↔ (1/√2) [1, 1]](data:image/svg+xml;base64,PHN2ZyB4bWxucz0iaHR0cDovL3d3dy53My5vcmcvMjAwMC9zdmciIHdpZHRoPSIxNTIiIGhlaWdodD0iMTYiIHZpZXdCb3g9IjAgMCAxNTIgMTYiPjxyZWN0IHdpZHRoPSIxMDAlIiBoZWlnaHQ9IjEwMCUiIHN0eWxlPSJmaWxsOiNjZmQ0ZGI7ZmlsbC1vcGFjaXR5OiAwLjE7Ii8+PC9zdmc+ "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 115")
Ротор в виде матрицы:
![e₁e₂ ↔ iσ₃. Тогда R(t) ↔ exp[-iσ₃φ] = [[e⁻ⁱᶲ, 0], [0, e⁺ⁱᶲ]]](data:image/svg+xml;base64,PHN2ZyB4bWxucz0iaHR0cDovL3d3dy53My5vcmcvMjAwMC9zdmciIHdpZHRoPSI0ODgiIGhlaWdodD0iMTYiIHZpZXdCb3g9IjAgMCA0ODggMTYiPjxyZWN0IHdpZHRoPSIxMDAlIiBoZWlnaHQ9IjEwMCUiIHN0eWxlPSJmaWxsOiNjZmQ0ZGI7ZmlsbC1vcGFjaXR5OiAwLjE7Ii8+PC9zdmc+ "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 116")
Состояние ψ(t) в виде вектора-столбца:
![ψ(t) = R(t)ψ(0) = (1/√2) [[e⁻ⁱᶲ, 0], [0, e⁺ⁱᶲ]] * [1, 1] = (1/√2) [e⁻ⁱᶲ, e⁺ⁱᶲ]](data:image/svg+xml;base64,PHN2ZyB4bWxucz0iaHR0cDovL3d3dy53My5vcmcvMjAwMC9zdmciIHdpZHRoPSI1OTIiIGhlaWdodD0iMTYiIHZpZXdCb3g9IjAgMCA1OTIgMTYiPjxyZWN0IHdpZHRoPSIxMDAlIiBoZWlnaHQ9IjEwMCUiIHN0eWxlPSJmaWxsOiNjZmQ0ZGI7ZmlsbC1vcGFjaXR5OiAwLjE7Ii8+PC9zdmc+ "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 117")
Это тот же результат, что и в стандартной КМ.Вычисление
:
Используем![ψ†(t) = (1/√2) [e⁺ⁱᶲ, e⁻ⁱᶲ].](data:image/svg+xml;base64,PHN2ZyB4bWxucz0iaHR0cDovL3d3dy53My5vcmcvMjAwMC9zdmciIHdpZHRoPSIyMzIiIGhlaWdodD0iMTYiIHZpZXdCb3g9IjAgMCAyMzIgMTYiPjxyZWN0IHdpZHRoPSIxMDAlIiBoZWlnaHQ9IjEwMCUiIHN0eWxlPSJmaWxsOiNjZmQ0ZGI7ZmlsbC1vcGFjaXR5OiAwLjE7Ii8+PC9zdmc+ "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 119")
![ψ(0) ↔ (1/√2) [1, 1]](/wp-content/uploads/2025/09/f07ba178f3c97fd0e370fed0f9914936.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 115")
![e₁e₂ ↔ iσ₃. Тогда R(t) ↔ exp[-iσ₃φ] = [[e⁻ⁱᶲ, 0], [0, e⁺ⁱᶲ]]](/wp-content/uploads/2025/09/f23d83189e581ceadafaba8bf2220911.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 116")
![ψ(t) = R(t)ψ(0) = (1/√2) [[e⁻ⁱᶲ, 0], [0, e⁺ⁱᶲ]] * [1, 1] = (1/√2) [e⁻ⁱᶲ, e⁺ⁱᶲ]](/wp-content/uploads/2025/09/e6e1df6a37834cb0064e56ca1f0df9c5.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 117")
 :
:![ψ†(t) = (1/√2) [e⁺ⁱᶲ, e⁻ⁱᶲ].](/wp-content/uploads/2025/09/1c5ca69981353b30b4adf66441640c51.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 119")
![<S_x> = ψ† (ħ/2)σ₁ ψ = (ħ/2) (1/2) [e⁺ⁱᶲ, e⁻ⁱᶲ] [[0, 1], [1, 0]] [e⁻ⁱᶲ, e⁺ⁱᶲ]=](/wp-content/uploads/2025/09/70070f71a6e54ffd08f0b7e88b66f2d3.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 120")
![(ħ/4) [e⁺ⁱᶲ, e⁻ⁱᶲ] [e⁺ⁱᶲ, e⁻ⁱᶲ] = (ħ/4) (e²ⁱᶲ + e⁻²ⁱᶲ) = (ħ/2)cos(2φ)= (ħ/2)cos(ω_Lt)](/wp-content/uploads/2025/09/0ae8f051ec9e6e9dea6c0f739054f6ba.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 121")
![<S_y> = ψ† (ħ/2)σ₂ ψ = (ħ/2) (1/2) [e⁺ⁱᶲ, e⁻ⁱᶲ] [[0, -i], [i, 0]] [e⁻ⁱᶲ, e⁺ⁱᶲ]=](/wp-content/uploads/2025/09/bc6e2f81739ec7811e5fa362e4aa046d.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 122")
![(ħ/4) [e⁺ⁱᶲ, e⁻ⁱᶲ] [-ie⁺ⁱᶲ, ie⁻ⁱᶲ] = (ħ/4) (-ie²ⁱᶲ + ie⁻²ⁱᶲ) = (ħ/2)sin(2φ)](/wp-content/uploads/2025/09/a0e35c0e1aeadee4398d887b91d24b2a.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 123")

![<S_z> = ψ† (ħ/2)σ₃ ψ = (ħ/2) (1/2) [e⁺ⁱᶲ, e⁻ⁱᶲ] [[1, 0], [0, -1]] [e⁻ⁱᶲ, e⁺ⁱᶲ]](/wp-content/uploads/2025/09/8c0199be28c7034829f2a7f744c59e8c.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 125")
![= (ħ/4) [e⁺ⁱᶲ, e⁻ⁱᶲ] [e⁻ⁱᶲ, -e⁺ⁱᶲ] = (ħ/4) (1 - 1) = 0](/wp-content/uploads/2025/09/44fd9639cc123bb1587757a74b2dc284.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 126")
Вектор ожидаемого значения спинового момента  равен:
равен:![<S>(t) = [ <S_x>, <S_y>, <S_z> ] = (ħ/2) [ cos(ω_Lt), sin(ω_L*t), 0 ]](/wp-content/uploads/2025/09/e0cbaab75272f782621fd748eab75578.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 128")
Что это описывает?
При
![t=0, <S>(0) = (ħ/2)[1, 0, 0]](data:image/svg+xml;base64,PHN2ZyB4bWxucz0iaHR0cDovL3d3dy53My5vcmcvMjAwMC9zdmciIHdpZHRoPSIyNDAiIGhlaWdodD0iMTYiIHZpZXdCb3g9IjAgMCAyNDAgMTYiPjxyZWN0IHdpZHRoPSIxMDAlIiBoZWlnaHQ9IjEwMCUiIHN0eWxlPSJmaWxsOiNjZmQ0ZGI7ZmlsbC1vcGFjaXR5OiAwLjE7Ii8+PC9zdmc+ "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 129") . Вектор направлен вдоль оси , как и было задано.
. Вектор направлен вдоль оси , как и было задано.При
 , вектор
, вектор  вращается в плоскости с постоянной угловой скоростью . Его -компонента остается равной нулю.
вращается в плоскости с постоянной угловой скоростью . Его -компонента остается равной нулю.
![t=0, <S>(0) = (ħ/2)[1, 0, 0]](/wp-content/uploads/2025/09/d853082d93b459ed1444cd734bc81bb1.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 129") . Вектор направлен вдоль оси
. Вектор направлен вдоль оси  , как и было задано.
, как и было задано. , вектор
, вектор  вращается в плоскости
вращается в плоскости  с постоянной угловой скоростью
с постоянной угловой скоростью  . Его
. Его  -компонента остается равной нулю.
-компонента остается равной нулю.Задача 2.
Частица со спином 1/2, начальное состояние которой «спин направлен вверх» (вдоль оси  ), помещается в постоянное однородное магнитное поле, направленное вдоль оси
), помещается в постоянное однородное магнитное поле, направленное вдоль оси  . Описать прецессию вектора спинового момента.
. Описать прецессию вектора спинового момента.
Решение.
Магнитное поле:

Начальное состояние
: «Спин вверх». Это собственное состояние оператора с собственным значением . В нашей стандартной конструкции это .Наша цель: Найти
и вычислить ожидаемые значения

 : «Спин вверх». Это собственное состояние оператора
: «Спин вверх». Это собственное состояние оператора  с собственным значением
с собственным значением  . В нашей стандартной конструкции это
. В нашей стандартной конструкции это  .
. и вычислить ожидаемые значения
и вычислить ожидаемые значения 
Начальное состояние: Состояние «спин вверх» по оси
соответствует нашему базовому проектору
 соответствует нашему базовому проектору
соответствует нашему базовому проектору Начальное состояние:
Состояние «спин вверх» по оси Z соответствует нашему базовому проектору
 Гамильтониан:
Гамильтониан:
Энергия взаимодействия  . Так как поле
. Так как поле  направлено вдоль
направлено вдоль  , оператор взаимодействия соответствует
, оператор взаимодействия соответствует  .
.

Уравнение движения и определение ротора
Уравнение Шредингера в ГА имеет вид  , где псевдоскаляр
, где псевдоскаляр  .
.

Вычисляем ключевой бивектор, который будет генератором вращения:

Уравнение движения принимает вид:

Решением является временная эволюция, описываемая ротором  :
:
![psi(t)=R(t) psi(0) quad text { где } quad R(t)=exp left[-e_2 e_3 frac{gamma B_0 t}{2}right]](/wp-content/uploads/2025/09/16e2e618cb6aaea86b4389ec99f240e7.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 158")
Обозначив Ларморовскую частоту  , получаем ротор, описывающий вращение:
, получаем ротор, описывающий вращение:
В плоскости: YZ (задается бивектором
)На угол:
 )
)

Чтобы найти наблюдаемые величины, переведем наши объекты в стандартный формализм.
Начальное состояние:

Нам нужно матричное представление для бивектора 

Тогда матрица ротора  :
:
![R(t) leftrightarrow expleft[ -isigma_1 frac{omega_L t}{2} right] = Icosleft(frac{omega_L t}{2}right) - isigma_1 sinleft(frac{omega_L t}{2}right)](/wp-content/uploads/2025/09/e1173ae36acc051243afb7f2e46c4989.svg "О формализме матриц Паули и геометрической алгебры в нерелятивистской квантовой механике 167")

Состояние в момент времени t:

Теперь вычисляем  , используя
, используя  .
.

Физический смысл:
Вращение происходит вокруг оси X. Начальная проекция спина на ось X была равна нулю, и она остается такой во все моменты времени, так как  коммутирует с гамильтонианом.
коммутирует с гамильтонианом.


Вектор ожидаемого значения спинового момента во времени:

Описание движения:
При
 . Спин направлен вдоль оси Z , как и было задано.
. Спин направлен вдоль оси Z , как и было задано.При
, вектор спина вращается. Его X-компонента всегда равна нулю. Компоненты Y и Z осциллируют, описывая окружность в плоскости YZ.
 . Спин направлен вдоль оси Z , как и было задано.
. Спин направлен вдоль оси Z , как и было задано. , вектор спина вращается. Его X-компонента всегда равна нулю. Компоненты Y и Z осциллируют, описывая окружность в плоскости YZ.
, вектор спина вращается. Его X-компонента всегда равна нулю. Компоненты Y и Z осциллируют, описывая окружность в плоскости YZ.Спин прецессирует вокруг оси магнитного поля (оси X) с Ларморовской частотой  . Формализм Геометрической Алгебры предсказал это с самого начала, определив, что генератором вращения является бивектор
. Формализм Геометрической Алгебры предсказал это с самого начала, определив, что генератором вращения является бивектор  , соответствующий плоскости YZ.
, соответствующий плоскости YZ.
Источник: habr.com

























