
Подробный обзор робота с дифференциальным приводом.
Делиться

1. Введение
При попытке численного решения сложной нелинейной и невыпуклой задачи оптимального управления можно столкнуться с рядом трудностей. В этой статье я рассмотрю такую сложную задачу — нахождение кратчайшего пути между двумя точками через поле препятствий для известной модели колесного робота. Я рассмотрю распространенные проблемы, возникающие при попытке численного решения такой задачи (в частности, негладкость функции стоимости и колебания в управлении), и способы их решения. Примеры помогут прояснить концепции. Весь код доступен здесь: https://github.com/willem-daniel-esterhuizen/car_OCP

1.1 План
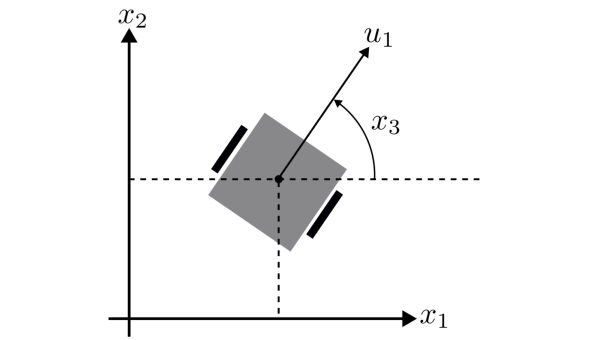
Сначала я представлю модель автомобиля, которую мы будем изучать на протяжении всей статьи. Затем я подробно изложу задачу оптимального управления. В следующем разделе будут рассмотрены все возникающие численные сложности, и в заключение будет представлена «разумная нелинейная программа», которая пытается их решить. Затем я подробно опишу метод гомотопии, который помогает направлять решатель к хорошему решению. После этого я покажу несколько численных экспериментов, чтобы все прояснить, и в заключение приведу ссылки на дополнительную литературу.
Источник: towardsdatascience.com

























